opencv调用matlab标定参数
Published:
OpenCV中查看matlab标定的结果,直接上代码。
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
VideoCapture inputVideo(0);
if (!inputVideo.isOpened())
{
cout << "Could not open the input video: " << endl;
return -1;
}
Mat frame;
Mat frameCalibration;
inputVideo >> frame;
Mat cameraMatrix = Mat::eye(3, 3, CV_64F);
cameraMatrix.at<double>(0, 0) = 4.450537506243416e+02;
cameraMatrix.at<double>(0, 1) = 0.192095145445498;
cameraMatrix.at<double>(0, 2) = 3.271489590204837e+02;
cameraMatrix.at<double>(1, 1) = 4.473690628394497e+02;
cameraMatrix.at<double>(1, 2) = 2.442734958206504e+02;
Mat distCoeffs = Mat::zeros(5, 1, CV_64F);
distCoeffs.at<double>(0, 0) = -0.320311439187776;
distCoeffs.at<double>(1, 0) = 0.117708464407889;
distCoeffs.at<double>(2, 0) = -0.00548954846049678;
distCoeffs.at<double>(3, 0) = 0.00141925006352090;
distCoeffs.at<double>(4, 0) = 0;
Mat view, rview, map1, map2;
Size imageSize;
imageSize = frame.size();
initUndistortRectifyMap(cameraMatrix, distCoeffs, Mat(),
getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, 1, imageSize, 0),
imageSize, CV_16SC2, map1, map2);
while (1) //Show the image captured in the window and repeat
{
inputVideo >> frame; // read
if (frame.empty()) break; // check if at end
remap(frame, frameCalibration, map1, map2, INTER_LINEAR);
imshow("Origianl", frame);
imshow("Calibration", frameCalibration);
char key = waitKey(1);
if (key == 27 || key == 'q' || key == 'Q')break;
}
return 0;
}
镜头的畸变校正效果如下:

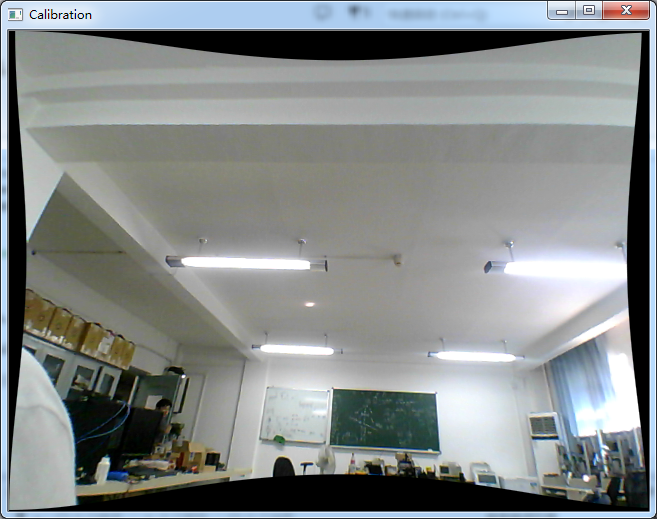
为什么选2系数而不是3系数。因为。。。。。。。 下面是三系数的修正结果,惨不忍睹啊。

原文链接:https://blog.csdn.net/Loser__Wang/article/details/51811347